




















1. Johdatus taajuusmuuttajiin (taajuusmuuttajat) Nykyaikaisen teollisen valvonnan alalla ...
LUE LISÄÄ
Kotiin / Uutiset / Teollisuuden uutisia / Sähkökäyttö selitettynä: miten se toimii, tyypit ja miksi sillä on merkitystä
Sähkökäyttö selitettynä: miten se toimii, tyypit ja miksi sillä on merkitystä
Mikä on sähköasema ja miten se toimii?
Sähkökäyttö on järjestelmä, joka käyttää sähköenergiaa säätämään moottorikäyttöisen mekaanisen kuorman nopeutta, vääntömomenttia ja suuntaa. Perustasoltaan sähkökäyttö koostuu kolmesta ydinelementistä: virtalähteestä, tehonmuunnosyksiköstä (kuten taajuusmuuttajasta tai moottoriohjaimesta) ja sähkömoottorista, joka muuttaa sähköenergian mekaaniseksi liikkeeksi. Käyttöjärjestelmä ohjaa sähköenergian toimittamista moottoriin, mikä mahdollistaa tarkan, tehokkaan ja herkän ohjauksen tehoon – olipa kyseessä sitten kuljetinhihnan pyörittäminen, pumpun juoksupyörän pyörittäminen, ajoneuvon kiihdyttäminen tai robottikäden ohjaaminen.
Se, mikä erottaa nykyaikaisen sähkökäytön yksinkertaisesti moottorin kytkemisestä suoraan virtalähteeseen, on ohjausyksikköön upotettu älykkyys. Suora-on-line moottoriliitäntä toimittaa täyden jännitteen ja taajuuden välittömästi, jolloin moottorille ei ole muuta vaihtoehtoa kuin toimia yhdellä kiinteällä nopeudella ilman kykyä moduloida vääntömomenttia tai mukautua muuttuviin kuormitusolosuhteisiin. Sähkökäyttöjärjestelmä asettaa ohjelmoitavan ohjaimen virtalähteen ja moottorin väliin, mikä mahdollistaa jännitteen, virran ja taajuuden jatkuvan reaaliaikaisen säädön nopeutta, kuormitusta, lämpötilaa ja sijaintia valvovien antureiden palautesignaalien perusteella. Tämä ohjattavuus on sähkökäyttötekniikan ratkaiseva etu kiinteänopeuksisiin mekaanisiin vaihtoehtoihin verrattuna.
Sähkökäyttöjärjestelmän ydinkomponentit
Sähköisen käyttöjärjestelmän muodostaminen on välttämätöntä kaikille, jotka määrittävät, ottavat käyttöön tai huoltavat sitä. Vaikka tietyt arkkitehtuurit vaihtelevat sovellusten mukaan, useimmissa sähkökäyttöjärjestelmissä on yhteinen joukko toiminnallisia komponentteja, jotka toimivat yhdessä tuottaen hallitun mekaanisen tehon.
Virtalähde ja tasasuuntaaja
Vaihtovirtakäyttöisissä sähkökäyttöjärjestelmissä verkosta tuleva vaihtovirta muunnetaan ensin tasavirraksi tasasuuntaajapiirin avulla. Tämä DC-väyläporras varastoi energiaa kondensaattoreihin ja tarjoaa vakaan välijännitteen, jonka taajuusmuuttajan taajuusmuuttajaporras voi sitten moduloida moottorin tarvitsemalle tarkalle lähtöaaltomuodolle. Tämän tasasuuntausvaiheen laatu vaikuttaa suoraan taajuusmuuttajan harmonisten vääristymien ominaisuuksiin ja yhteensopivuuteen sähköverkon kanssa. Tehokkaissa sähkökäytöissä on aktiiviset etutasasuuntaajat, jotka sekä vähentävät syöttöön takaisin ruiskutettuja harmonisia että mahdollistavat regeneratiivisen jarrutuksen – syöttävät energiaa takaisin verkkoon, kun moottori hidastuu.
Invertteri ja PWM-ohjaus
Invertteri on muuttuvan nopeuden sydän sähkökäyttö . Se ottaa tasavirtaväylän jännitteen ja käyttää joukkoa kytkentätransistoreita - tyypillisesti eristettyjä bipolaarisia hilatransistoreja (IGBT) - rekonstruoidakseen vaihtuvataajuisen, muuttuvan jännitteen vaihtovirtalähdön tekniikalla, jota kutsutaan pulssinleveysmodulaatioksi (PWM). Kytkemällä transistorit päälle ja pois nopeasti tuhansia kertoja sekunnissa, taajuusmuuttaja syntetisoi tasaisen, säädettävän AC-aaltomuodon, jonka moottori tulkitsee aidoksi sinimuotoiseksi syötöksi. Lähtötaajuuden muuttaminen muuttaa moottorin nopeutta; lähtöjännitteen muuttaminen suhteessa taajuuteen ylläpitää moottorin vakiovuon ja vääntömomentin kapasiteetin koko nopeusalueella. PWM-invertterin kytkentätaajuus – tyypillisesti 2 kHz ja 16 kHz välillä – vaikuttaa sekä moottorin tuottamaan ääniin että itse taajuusmuuttajan kytkentähäviöihin.
Moottorin ohjausprosessori ja palautesilmukka
Mikroprosessori tai DSP (digitaalinen signaaliprosessori) sähkökäytössä suorittaa ohjausalgoritmin, joka muuntaa nopeuden tai vääntömomentin asetusarvon tarkiksi invertterin kytkentäkäskyiksi. Yksinkertaisemmissa skalaari- (V/f) ohjauskäytöissä prosessori ylläpitää kiinteää jännite-taajuussuhdetta ja reagoi suhteellisen hitaasti kuormituksen muutoksiin. Kehittyneemmissä vektoriohjauksessa tai suoran momentin ohjauksen (DTC) asemissa prosessori laskee jatkuvasti moottorin magneettivuon ja vääntömomenttia tuottavien virtakomponenttien hetkellisen sijainnin ja suuruuden, mikä mahdollistaa alle millisekunnin vasteen dynaamisiin kuormituksen muutoksiin. Palaute prosessorille tulee taajuusmuuttajan virtaantureista ja valinnaisesti ulkoisesta kooderista tai resolverista, joka on asennettu moottorin akseliin tarkan asennon ja nopeuden mittaamiseksi.
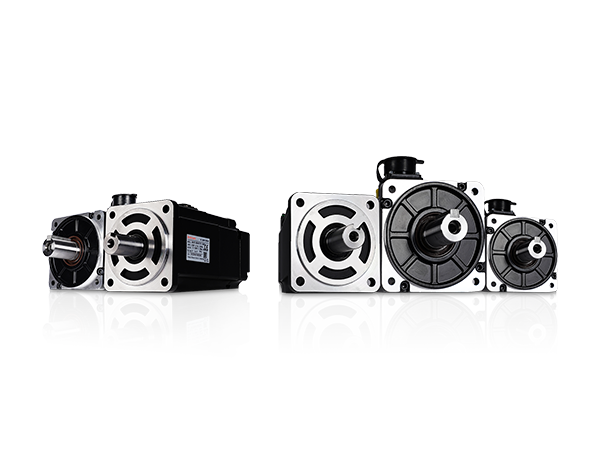
Sähkömoottori
Moottori on sähköisen käyttöjärjestelmän lähtölaite, joka muuntaa ohjatun sähköenergian käytöstä mekaaniseksi akselin pyörimiseksi. Yleisin säädettävänopeuksisten sähkökäyttöjen moottorityyppi on kolmivaiheinen oikosulkumoottori (kutsutaan myös asynkroniseksi moottoriksi), joka on vankka, vähän huoltoa vaativa ja sitä on saatavana valtavan valikoiman tehoja ja runkokokoja. Kestomagneettisynkronimoottoreita (PMSM) käytetään yhä enemmän sekä teollisuuden että autojen sähkökäyttösovelluksissa, joissa korkea tehotiheys, korkea hyötysuhde laajalla nopeusalueella ja kompakti koko ovat etusijalla. Kytkettyjä reluktanssimoottoreita ja kierretty-roottorisynkronimoottoreita käytetään erikoistuneissa suuritehoisissa tai ankarissa ympäristöissä sähkökäyttöisissä käyttösovelluksissa.
Sähkökäyttöisten järjestelmien päätyypit
Sähkökäyttötekniikka käsittää useita erillisiä järjestelmäarkkitehtuureja, joista jokainen sopii erilaisiin suorituskykyvaatimuksiin, moottorityyppeihin ja sovellusympäristöihin. Alla olevassa taulukossa on yhteenveto sähkökäyttöjen päätyypeistä ja niiden tärkeimmistä ominaisuuksista.
| Aseman tyyppi | Moottorin yhteensopivuus | Valvontamenetelmä | Tyypilliset sovellukset |
| Variable Frequency Drive (VFD) | AC induktio, PMSM | V/f-skalaari, vektoriohjaus | Pumput, tuulettimet, kuljettimet, LVI |
| Servo Drive | PMSM, harjaton DC | Suljetun silmukan vektori, enkooderin palaute | CNC-koneet, robotiikka, pakkaus |
| DC-asema | DC-harjattu moottori | Tyristori/SCR-vaiheen ohjaus | Vanhat teollisuuslaitteet, nosturit, suulakepuristimet |
| Stepper Drive | Askelmoottori | Avoin silmukan askel/suunta | 3D-tulostimet, plotterit, pieni paikannus |
| Vetovoima (EV) | PMSM, oikosulkumoottori | Kenttäsuuntautunut ohjaus (FOC) | Sähköajoneuvot, sähköpyörät, junat |
| Regeneratiivinen Drive | AC induktio, PMSM | Aktiivinen etuosa, nelikvadrantti | Hissit, testilaitteet, tuuliturbiinit |
Sähkökäyttö sähköajoneuvoissa: miten autojen vetovoima toimii
Sähkökäyttöinen akkusähköajoneuvo (BEV) on yksi suorituskyvyn kannalta kriittisimmistä ja teknisesti kehittyneimmistä sähkökäyttötekniikan nykyisistä sovelluksista. Auton sähkökäyttöisen järjestelmän on toimitettava tasainen, välitön vääntömomentti levosta, ylläpidettävä suurta tehoa pitkiä aikoja, toimittava tehokkaasti valtavalla nopeusalueella, kestettävä vuosikymmeniä jatkuvaa tärinää ja lämpötilavaihtelua ja sopia äärimmäisen tiukoille pakkausrajoituksille – kaikki samanaikaisesti.
Kuinka sähköauton vetovoima toimii
Akkusähköajoneuvossa suurjänniteakkupaketti (yleensä 400 V tai 800 V) syöttää tasavirtaa ajoinvertteriin, joka muuntaa sen kolmivaiheiseksi vaihtovirraksi taajuudella ja jännitteellä, joka vaaditaan kuljettajan ohjaaman vääntömomentin tuottamiseksi. Vetoinvertteri käyttää kenttäorientoitua ohjausta (FOC) säätelemään itsenäisesti vuota ja momenttia tuottavia virtakomponentteja moottorissa, mikä mahdollistaa tarkan vääntömomentin toimittamisen jopa erittäin alhaisilla nopeuksilla. Moottorin ulostuloakseli liitetään yksinopeuksiseen alennusvaihteistoon – sähkömoottorit tuottavat hyödyllistä vääntömomenttia erittäin laajalla nopeusalueella, mikä eliminoi moninopeuksisen vaihteiston tarpeen – ja sieltä vetäviin pyöriin tasauspyörästön tai joissakin arkkitehtuureissa yksittäisten pyörän sisäisten moottoreiden kautta.
Regeneratiivinen jarrutus sähköautoissa
Yksi ajoneuvojen sähkökäyttöisten järjestelmien merkittävimmistä energiatehokkuuden eduista on regeneratiivinen jarrutus. Kun kuljettaja nostaa kaasupolkimen tai jarruttaa, vetovoimansiirto ohjaa moottorin toimimaan generaattorina, joka muuttaa ajoneuvon liike-energian takaisin sähköenergiaksi ja syöttää sen takaisin akkuun. Invertteri toimii päinvastaisessa energiavirtauksessa, jolloin moottori tuottaa nyt jarrutusmomentin samalla kun se toimii sähkölähteenä. Kaupunkiajosykleissä, joissa kiihdytetään ja hidastetaan usein, regeneratiivinen jarrutus voi ottaa talteen 15–25 % käytetystä kokonaisenergiasta, mikä pidentää merkittävästi kantamaa verrattuna siihen, mikä saavutettaisiin pelkällä kitkajarrutuksella.
Yksimoottori vs. kaksoismoottori ja neliveto
Lähtötason sähköautot käyttävät tyypillisesti yhtä sähkökäyttöistä vetoyksikköä, joka käyttää joko etu- tai taka-akselia. Kaksimoottoriset kokoonpanot – yhdellä vetoyksiköllä akselia kohden – tarjoavat nelivetokyvyn ja mahdollistavat ajoneuvon hallintajärjestelmän itsenäisesti ohjata vääntömomenttia jokaisella akselilla ylivertaisen pidon ja dynamiikan saavuttamiseksi. Joissakin korkean suorituskyvyn sähköautoissa on kolme tai jopa neljä yksittäistä vetoyksikköä, yksi pyörää kohti, mikä mahdollistaa vääntömomentin vektoroinnin sellaisella tarkkuudella, jota mikään mekaaninen tasauspyörästö ei pysty vastaamaan. Jokaisen sähköisen käyttöyksikön itsenäinen ohjattavuus on sähköistetyillä voimansiirroilla perinteisiin mekaanisiin järjestelmiin verrattuna perusetu.
Teollisuuden sähkökäyttösovellukset ja energiansäästö
Teollisuuden sähkökäytöt – pääasiassa taajuusmuuttajakäytöt, jotka ohjaavat AC-oikosulkumoottoreita – muodostavat merkittävän osan maailmanlaajuisesta teollisuuden sähkönkulutuksesta. Kansainvälisen energiajärjestön mukaan sähkömoottorijärjestelmät kuluttavat noin 45 prosenttia kaikesta maailmanlaajuisesti tuotetusta sähköstä, ja suurin osa tästä kulutuksesta tapahtuu teollisissa ympäristöissä. Kiinteänopeuksisten suorakäynnistimien korvaaminen säädettävänopeuksisilla sähkökäytöillä tarjoaa eräitä kustannustehokkaimmista teollisessa käytössä olevista energiansäästöistä.
Affiniteettilait: Miksi nopeudensäätö säästää niin paljon energiaa
Keskipakoiskuormituksilla – pumput, puhaltimet, kompressorit ja puhaltimet – moottorin nopeuden ja virrankulutuksen välinen suhde noudattaa affiniteettilakeja: tehonkulutus on verrannollinen nopeussuhteen kuutioon. Tämä tarkoittaa, että pumpun moottorin nopeuden alentaminen 100 %:sta 80 %:iin täydestä nopeudesta vähentää sen virrankulutusta noin 51 %:iin sen täyden nopeuden arvosta (0,8³ = 0,512). Nopeuden vähentäminen 60 prosenttiin vähentää kulutuksen vain 22 prosenttiin täydestä nopeudesta. Pumppaus- ja LVI-järjestelmissä, joissa virtauksen tarve vaihtelee päivän tai vuoden aikana, kiinteänopeuksisen moottorikäytön korvaaminen muuttuvanopeuksisella sähkökäytöllä voi vähentää energiankulutusta 30–60 % ja takaisinmaksuajat ovat usein alle kaksi vuotta tyypillisillä teollisuuden sähkötariffeilla.
Pehmeä käynnistys ja pienempi mekaaninen rasitus
Energiansäästön lisäksi säädettävänopeuksiset sähkökäytöt suojaavat sekä moottoria että käytettävää mekaanista järjestelmää eliminoimalla suoran käynnistyksen aiheuttaman suuren käynnistysvirran ja iskunmomentin. Kun moottori käynnistetään suoraan verkkoon, se kuluttaa 6-10 kertaa täyskuormitusvirtaansa ensimmäisten sekuntien aikana ja kohdistaa mekaaniseen järjestelmään impulsiivisen vääntömomenttipiikin. Ajan myötä tämä toistuva mekaaninen väsymys kuormittaa kytkimiä, vaihteistoja, kuljetinhihnoja, putkiliitoksia ja pumpun juoksupyöriä. Käynnistys sähkökäytöllä – nopeutuu tasaisesti ohjelmoitavan kiihdytysrampin yli – vähentää huippukäynnistysvirran 100–150 prosenttiin täyden kuormituksen virrasta ja eliminoi vääntömomenttipiikin kokonaan, mikä pidentää mitattavasti koko voimansiirron käyttöikää.

Tärkeimmät tekniset tiedot valittaessa sähkökäyttöä
Valitsetpa teollisen nopeussäädettävän nopeudenkäytön pumppusovellukseen tai arvioit sähkökäyttöjärjestelmää ajoneuvossa, seuraavat tekniset tiedot ovat tärkeimpiä ymmärtääksesi ja vastaamaan sovelluksesi vaatimuksia.
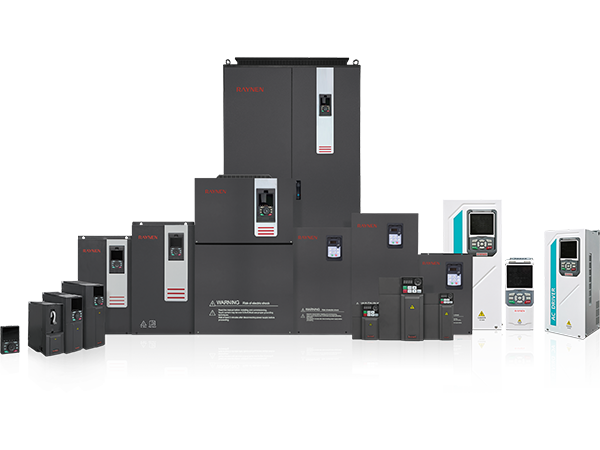
- Teholuokitus (kW tai hv): Taajuusmuuttajan jatkuvan lähtötehon on oltava yhtä suuri tai suurempi kuin sen ohjaaman moottorin täyden kuormituksen tehovaatimus. Useimmat taajuusmuuttajat määrittävät myös ylikuormituskapasiteetin – esimerkiksi 150 % nimellisvirrasta 60 sekunnin ajan – jonka on oltava riittävä sovelluksen kiihdytysmomenttivaatimuksiin.
- Tulojännite ja taajuus: Taajuusmuuttajat on suunniteltu tietyille tulojännitealueille (esim. 200–240 V yksivaiheinen, 380–480 V kolmivaiheinen, 690 V kolmivaiheinen) ja tulotaajuudelle (50 Hz tai 60 Hz). Taajuusmuuttajan sovittaminen käytettävissä olevaan syöttöjännitteeseen on välttämätöntä; useimmat nykyaikaiset taajuusmuuttajat hyväksyvät ±10 % jännitetoleranssin ja sopivat sekä 50 Hz:n että 60 Hz:n syöttötaajuuksille.
- Lähtötaajuusalue: Vaihtelevan nopeuden sovelluksissa taajuusmuuttajan lähtötaajuusalue määrittää moottorin nopeusalueen, jonka se pystyy toimittamaan. Tyypillinen teollinen VFD tuottaa 0 Hz - 500 Hz tai enemmän, mikä tarjoaa paljon laajemman nopeusalueen kuin mikään mekaaninen nopeudensäätöjärjestelmä. Pienin säädettävä nopeus menettämättä vääntömomenttikykyä on yhtä tärkeä sovelluksissa, jotka vaativat vakaata hidasta toimintaa.
- Ohjaustila (V/f, avoimen silmukan vektori, suljetun silmukan vektori): V/f-skalaarisäätö riittää yksinkertaisiin keskipakokuormitussovelluksiin, joissa ei ole tarkkuusnopeutta tai vääntömomenttivaatimuksia. Avoimen silmukan vektoriohjaus (anturiton vektori) tarjoaa paremman vääntömomentin alhaisilla nopeuksilla ja dynaamisen vasteen ilman kooderia. Suljetun silmukan vektoriohjaus kooderin takaisinkytkennällä tarjoaa parhaan dynaamisen suorituskyvyn ja nopeuden tarkkuuden, mikä on tarpeen paikannussovelluksissa ja suuren inertian kuormissa, jotka vaativat nopeaa vääntömomenttivastetta.
- Ympäristönsuojeluluokitus (IP-luokitus): Taajuusmuuttajan kotelon IP (Ingress Protection) -luokitus määrittää sen pölyn ja veden tunkeutumisenkestävyyden. IP20-taajuusmuuttajat sopivat puhtaisiin ja kuiviin ohjauspaneeleihin. IP54- tai IP55-asemia käytetään pölyisissä tai roiskeherkissä teollisuusympäristöissä. IP66 tai korkeampi vaaditaan ulkoasennuksiin tai pesuympäristöihin elintarvikejalostuksessa ja vastaavilla aloilla.
- Viestintärajapinnat: Nykyaikaiset sähkökäytöt tukevat useita teollisia viestintäprotokollia integroitaviksi PLC:iden ja valvontajärjestelmien kanssa. Yleisiä liitäntöjä ovat Modbus RTU/TCP, PROFIBUS, PROFINET, EtherNet/IP, CANopen ja EtherCAT. Valitsemalla taajuusmuuttajan, jolla on oikea protokolla automaatiojärjestelmääsi, vältytään kalliilta yhdyskäytävälaitteistoilta ja yksinkertaistetaan käyttöönottoa ja diagnostiikkaa.
- Jarrutuskyky: Sovellukset, joissa on suuri inertiakuormitus tai toistuvia hidastusjaksoja – kuten sentrifugit, nostimet, nosturit ja testitelineet – edellyttävät taajuusmuuttajaa, jossa on joko sisäänrakennettu jarrutransistori ja ulkoinen jarruvastus dynaamista jarrutusta varten (hajottaa jarrutusenergiaa lämpönä) tai aktiivisen etupään regeneratiivisen käyttölaitteen, joka syöttää jarrutusenergiaa takaisin syöttöverkkoon.
Sähkökäyttö vs. hydraulikäyttö vs. mekaaninen käyttö: käytännön vertailu
Monissa teollisuus- ja mobiililaitteiden sovelluksissa sähkökäyttöjärjestelmät kilpailevat suoraan hydraulisten ja mekaanisten käyttövaihtoehtojen kanssa. Jokaisella tekniikalla on todellisia vahvuuksia ja heikkouksia, ja oikea valinta riippuu sovelluksen erityisvaatimuksista. Alla oleva vertailu tuo esiin tärkeimmät käytännön erot.
| Kriteerit | Sähkökäyttö | Hydraulinen veto | Mekaaninen käyttövoima |
| Tehokkuus | Korkea (85–97 %) | kohtalainen (60–80 %) | Korkea (kiinteä suhde) |
| Nopeuden hallittavuus | Erinomainen (laaja valikoima) | Hyvä | Rajoitettu (kiinteä tai porrastettu) |
| Tehon tiheys | Korkea (PMSM) | Erittäin korkea | Kohtalainen |
| Huolto | Matala | Korkea (tiivisteet, neste, suodattimet) | Kohtalainen (lubrication, wear parts) |
| Puhtaus | Siisti, ei nestevaaraa | Vuodon ja tulipalon vaara | Puhdista |
| Melutaso | Matala to moderate | Korkea (pumppu, venttiilin ääni) | Kohtalainen |
| Kauko-ohjattava | Erinomainen | Kohtalainen | Köyhä |
Sähkökäyttöjärjestelmän asennus ja käyttöönotto: mitä tehdä oikein
Paraskin sähkökäyttöjärjestelmä ei toimi kunnolla tai epäonnistuu ennenaikaisesti, jos se asennetaan tai otetaan käyttöön väärin. Seuraavat kohdat kattavat teollisuuden sähkökäyttöjen kriittisimmät asennus- ja asetusnäkökohdat.
Lämmönhallinta ja ilmanvaihto
Sähkökäyttöiset käytöt tuottavat lämpöä käytön aikana – pääasiassa vaihtosuuntaajan IGBT:n kytkentähäviöistä ja virtapiirin johtavuushäviöistä. Useimmat taajuusmuuttajat on suunniteltu toimimaan ympäristön lämpötila-alueella 0 °C - 40 °C (32 °F - 104 °F) täydellä nimellisvirralla. Yli 40 °C:n ympäristön lämpötilassa taajuusmuuttajaa on vähennettävä – käytettävä pienellä lähtövirralla – sisäisten komponenttien lämpötilan pitämiseksi turvallisissa rajoissa. Varmista, että taajuusmuuttaja on asennettu paikkaan, jossa on riittävä ilmankierto, tarvittava välys yksikön ylä- ja alapuolella jäähdytysilmavirtaa varten valmistajan asennusoppaan mukaisesti ja että ohjauspaneelissa tai kotelossa on riittävä ilmanvaihto tai pakotettu ilmajäähdytys kaikkien asennettujen taajuusmuuttajien täydelliseen lämmönpoistoon.
Moottorikaapelin pituus ja EMC-suodatus
Säädettävänopeuksisen sähkökäytön PWM-lähtöaaltomuoto sisältää suurtaajuisia jännitekomponentteja, jotka voivat aiheuttaa ongelmia moottoriin menevien pitkien kaapelien aikana. Jännitteen heijastusvaikutukset pitkissä moottorikaapeleissa (määritetään tyypillisesti yli 50 metrin mittaisiksi taajuusmuuttajille ilman lähtöreaktoria) voivat aiheuttaa moottorin liittimissä huippujännitteitä, jotka ovat huomattavasti korkeampia kuin taajuusmuuttajan tasavirtaväylän jännite, mikä rasittaa moottorin käämien eristystä. Jos kaapeli kulkee yli taajuusmuuttajan valmistajan ilmoittaman rajan ilman lieventämistä, asenna lähtöreaktori (kutsutaan myös moottorin kuristimeksi) tai dV/dt-suodatin taajuusmuuttajan lähtöön. Varmista lisäksi, että moottorikaapeli on suojattu (suojattu) niin, että suoja on liitetty maahan sekä taajuusmuuttajan että moottorin päistä, ja että moottorikaapeli on reititetty erillään signaali- ja ohjauskaapeleista sähkömagneettisten häiriöiden (EMI) minimoimiseksi.
Parametrien asetus ja moottorin tunnistus
Ennen kuin otat sähkökäytön käyttöön ensimmäistä kertaa, syötä moottorin tyyppikilven tiedot – nimellisjännite, nimellisvirta, nimellistaajuus, nimellisnopeus ja moottorin tehokerroin – taajuusmuuttajan parametrijoukkoon. Useimmat nykyaikaiset taajuusmuuttajat sisältävät automaattisen moottorin tunnistus- tai automaattisen viritysrutiinin, joka suorittaa moottorin ohjatun testijakson läpi ja mittaa kytketyn moottorin todelliset sähköiset ominaisuudet optimoiden taajuusmuuttajan sisäiset ohjausparametrit kyseiselle moottorille. Automaattisen viritysrutiinin suorittaminen ennen järjestelmän käyttöönottoa on erittäin suositeltavaa, erityisesti vektoriohjauskäytöissä, koska se parantaa merkittävästi nopeudensäätötarkkuutta ja dynaamista vääntömomenttivastetta verrattuna pelkkään tyyppikilven arvioituihin moottoriparametreihin.
Sähkökäyttötekniikan tulevaisuus
Sähkökäyttötekniikka kehittyy nopeasti monilla rintamilla liikenteen sähköistymisen, teollisuuden lisääntyvän automaation ja maailmanlaajuisen energiankulutuksen ja hiilidioksidipäästöjen vähentämisen myötä. Useat keskeiset kehityssuunnat muokkaavat seuraavan sukupolven sähkökäyttöjärjestelmiä.
- Leveät kaistanväliset puolijohteet (SiC ja GaN): Piikarbidin (SiC) ja galliumnitridin (GaN) tehotransistorit korvaavat tavanomaiset pii-IGBT:t korkean suorituskyvyn sähkökäytöissä. Nämä laajakaistaiset laitteet kytkeytyvät nopeammin, toimivat korkeammissa lämpötiloissa ja niillä on pienemmät kytkentähäviöt kuin piillä, minkä ansiosta asemat ovat pienempiä, kevyempiä, tehokkaampia ja pystyvät korkeammille kytkentätaajuuksille. SiC-invertterit ovat nyt vakiona huippuluokan sähköajoneuvojen vetovoimansiirroissa, ja ne ovat nopeasti tulossa teollisuuskäyttötuotteisiin.
- Integroidut moottorikäyttöyksiköt: Käyttöelektroniikan asentaminen suoraan moottorin koteloon tai sen sisään – integroidun moottorikäyttöyksikön luominen – eliminoi pitkän moottorikaapelin, vähentää EMI:tä, parantaa järjestelmän tehokkuutta ja yksinkertaistaa asennusta. Integroidut sähkökäyttöiset moottorit ovat saamassa vetoa pumppu- ja puhallinsovelluksissa, LVI-järjestelmissä ja sähköajoneuvojen apujärjestelmissä.
- AI ja ennakoiva ylläpito: Nykyaikaiset sähkökäytöt tuottavat jatkuvan toimintadatan virran – virta, jännite, nopeus, lämpötila, tärinä ja vikahistoria. Näihin tietoihin sovelletut tekoäly- ja koneoppimisalgoritmit voivat havaita hienovaraisia muutoksia moottorin tai kuormituksen käyttäytymisessä, jotka edeltävät vikoja viikoilla tai kuukausilla, mikä mahdollistaa ennakoivat huoltotoimenpiteet, jotka estävät odottamattomat seisokit. Pilviin liitetyt asemat, joissa on sisäänrakennettu kunnonvalvonta, ovat yhä vakiona teollisuusautomaatioalustoissa.
- Sähköautojen korkeajännitearkkitehtuurit: Autojen sähkökäyttöjärjestelmät ovat siirtymässä 400 V:sta 800 V:n akkuarkkitehtuureihin, mikä vähentää tietylle tehotasolle vaadittavaa virtaa, mikä mahdollistaa ohuemmat ja kevyemmät johtosarjat ja mahdollistaa paljon nopeamman tasavirta-pikalatauksen. Porschen ja Hyundai/Kian uranuurtamasta 800 V:n sähkökäyttöarkkitehtuurista on tulossa uusi standardi pitkän kantaman premium-sähköajoneuvoille, ja sen odotetaan yleistyvän kaikissa sähköautosegmenteissä seuraavien vuosien aikana.
- Grid-interaktiiviset ja ajoneuvosta verkkoon (V2G) -asemat: Kaksisuuntaiset sähkökäyttöjärjestelmät, jotka pystyvät viemään sähköä sähköauton akusta takaisin sähköverkkoon tai rakennuksen sähköjärjestelmään, ovat siirtymässä demonstraatioprojekteista kaupalliseen käyttöön. V2G-yhteensopivien sähkökäyttöjen ansiosta sähköajoneuvojen akut voivat toimia hajautettuina energiavarastoina, jotka tarjoavat verkon vakauspalveluita ja antavat sähköajoneuvojen omistajille mahdollisuuden ansaita tuloja myymällä varastoitua energiaa kysyntähuippujen aikana.
Edellinen viesti
Taajuusmuuttuja selitetty: miten se toimii ja milloin tarvitset sellaisen
Seuraava viesti
Pienjännitepehmokäynnistin: miten se toimii, milloin sitä käytetään ja kuinka valita oikea
Tekijänoikeus 2024 Fujian Raynen Technology Co., Ltd. Kaikki oikeudet pidätetään.
Tietosuojakäytäntö  Moottoriohjauksen valmistajat
Moottoriohjauksen valmistajat