




















1. Johdatus taajuusmuuttajiin (taajuusmuuttajat) Nykyaikaisen teollisen valvonnan alalla ...
LUE LISÄÄ
Kotiin / Uutiset / Teollisuuden uutisia / AC-servomoottori selitetty: miten se toimii, tyypit ja kuinka valita oikea
AC-servomoottori selitetty: miten se toimii, tyypit ja kuinka valita oikea
Mikä on AC-servomoottori?
AC-servomoottori on eräänlainen sähkömoottori, joka toimii vaihtovirralla ja on suunniteltu tarjoamaan tarkan asennon, nopeuden ja vääntömomentin hallinnan. Toisin kuin tavallinen AC-moottori, joka vain pyörii kiinteällä nopeudella, servomoottori saa jatkuvasti palautetta sen akseliin kiinnitetystä kooderista. Tämä palaute kertoo järjestelmälle tarkalleen missä moottori on kulloinkin, jolloin se voi tehdä reaaliaikaisia korjauksia ja pitää tavoiteasennon suurella tarkkuudella.
Sana "servo" tulee latinan sanasta orja - ja se on pohjimmiltaan mitä se tekee. Se noudattaa uskollisesti ohjaimen komentoja ja säätää itseään jatkuvasti vastaamaan vaadittua asentoa, nopeutta tai vääntömomenttia. Tämä tekee AC-servomoottoreista nykyaikaisen automaation, CNC-koneiden, robotiikan ja kaikkien sovellusten selkärangan, jossa tarkkuusliikkeet ovat tärkeitä.
Se, mikä erottaa AC-servomoottorin DC-servomoottorista, on virtalähde ja rakenne. AC-servomoottorit ovat yleensä kestävämpiä, vaativat vähemmän huoltoa (ei vaihdettavia harjoja) ja ne sopivat paremmin nopeisiin ja suuritehoisiin teollisuusympäristöihin. Niitä käytetään lähes aina yhdessä servokäytön (kutsutaan myös servovahvistimeksi) ja liikeohjaimen kanssa täydellisen suljetun silmukan servojärjestelmän muodostamiseksi.
Kuinka AC-servomoottori toimii
AC-servomoottorin perusperiaate on suljetun silmukan takaisinkytkentäohjaus. Tässä on selkeä erittely järjestelmän toiminnasta alusta loppuun:
- Komennon syöttö: Liikeohjain (PLC, CNC-ohjain tai PC) lähettää tavoitearvon - kuten "käännä 90 astetta" tai "pyöritä 3 000 rpm" - servokäyttöön.
- Servokäytön lähtö: Servokäyttö muuntaa komennon tarkasti ohjatuksi AC-jännitteeksi ja -virraksi, joka syötetään moottoriin.
- Moottorin liike: Moottorin roottori liikkuu staattorikäämien synnyttämän sähkömagneettisen kentän vaikutuksesta.
- Enkooderin palaute: Moottorin akselille asennettu pyörivä anturi mittaa jatkuvasti todellista sijaintia ja nopeutta ja lähettää nämä tiedot takaisin servokäyttöön.
- Virheen korjaus: Taajuusmuuttaja vertaa todellista sijaintia käskettyyn asentoon ja säätää heti lähtöä eron poistamiseksi (kutsutaan "virheeksi").
Tämä silmukka käy satoja tai tuhansia kertoja sekunnissa, minkä vuoksi servojärjestelmät voivat saavuttaa niin tiukat toleranssit. Kooderi on kriittinen komponentti – useimmat nykyaikaiset AC-servomoottorit käyttävät korkearesoluutioisia koodereita 17- tai 23-bittisellä resoluutiolla, mikä tarkoittaa, että ne voivat havaita miljoonia erillisiä paikkoja kierrosta kohden.
AC-servomoottorien tyypit
Nykyään teollisuudessa käytetään kahta päätyyppiä AC-servomoottoreita, joilla kullakin on erilaiset toimintaperiaatteet ja ihanteelliset käyttötapaukset.
Synkroninen AC-servomoottori (PMSM)
Synkroninen AC servomoottori — joka tunnetaan myös nimellä PMSM (Permanent Magnet Synchronous Motor) — käyttää kestomagneetteja, jotka on upotettu roottoriin. Roottori pyörii täsmällisesti tahdissa staattorin pyörivän magneettikentän kanssa. Koska magneetit ovat aina päällä, tämän tyyppinen moottori tuottaa suuren vääntömomentin myös alhaisilla nopeuksilla ja sillä on erinomainen dynaaminen vaste.
Synkroniset servomoottorit ovat ylivoimaisesti yleisin teollisuusautomaatiossa ja CNC-sovelluksissa käytetty tyyppi. Ne ovat kompakteja, tehokkaita ja pystyvät ylläpitämään nimellisvääntömomentin laajalla nopeusalueella. Brändit, kuten Mitsubishi, Fanuc, Yaskawa ja Siemens, tarjoavat kaikki synkroniset servomoottorit ensisijaisena tuotelinjanaan.
Induktio-AC servomoottori (asynkroninen)
Induktioservomoottori käyttää oravahäkkiroottoria, jossa pyörivä magneettikenttä indusoi virran – kestomagneetteja ei ole. Roottori jää aina hieman staattorikentän jälkeen (tätä kutsutaan "luistoksi"), jolloin vääntömomentti syntyy. Yhdistettynä vektoriohjatun servokäytön kanssa oikosulkumoottorit voivat myös saavuttaa hyvän nopeuden ja vääntömomentin säädön, vaikkakaan eivät tyypillisesti yhtä tarkasti tai herkästi kuin synkroniset tyypit.
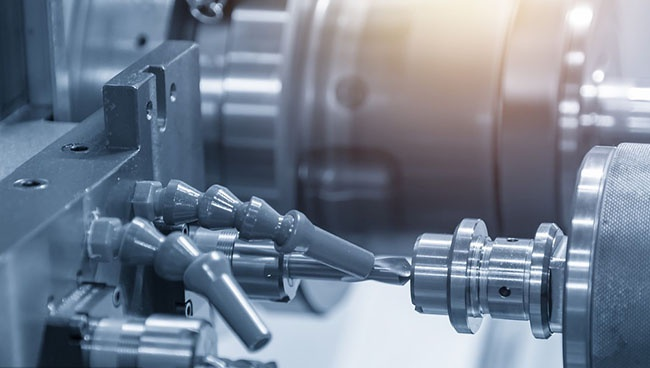
Induktioservomoottorit valitaan usein suuritehoisiin karasovelluksiin, kuten CNC-jyrsinkoneiden karoihin, joissa erittäin suuret nopeudet ja kestävyys ovat tärkeämpiä kuin erittäin tarkka paikoitus. Ne ovat myös halvempia suuremmilla teholuokilla.
Tärkeimmät tiedot, jotka sinun on ymmärrettävä
Ennen kuin valitset tai työskentelet minkä tahansa AC-servomoottorin kanssa, sinun on ymmärrettävä teknisten tietojen ydintiedot. Tässä on selväkielinen erittely tärkeimmistä parametreista:
| Erittely | Mitä se tarkoittaa | Miksi sillä on merkitystä |
| Nimellisvääntömomentti (N·m) | Moottori voi tuottaa jatkuvan vääntömomentin nimellisnopeudella | On ylitettävä kuormitusmomentti, mukaan lukien kitka ja inertia |
| Huippuvääntömomentti (N·m) | Suurin vääntömomentti lyhyille purskeille (tyypillisesti 2–3-kertainen nimellisarvo) | Tarvitaan kiihdytys- ja hidastusvaiheissa |
| Nimellisnopeus (RPM) | Normaali käyttönopeus nimellisvääntömomentilla | Määrittää, sopiiko moottori liikeprofiiliisi |
| Nimellisteho (W tai kW) | Lähtö mekaaninen teho (vääntömomentti × nopeus) | Käytetään sovittamaan taajuusmuuttajaa ja kaapeleiden/katkaisijoiden kokoa |
| Enkooderin resoluutio | Pulssien tai bittien lukumäärä kierrosta kohti | Korkeampi resoluutio = tarkempi asennonsäätö |
| Roottorin hitaus (kg·cm²) | Roottorin vastustuskyky pyörimisnopeuden muutoksille | On sovitettava kuorman inertiaan vakaan ohjauksen varmistamiseksi |
| IP-luokitus | Suojaustaso pölyä ja vettä vastaan | Kriittinen ankarissa tai märissä ympäristöissä |
AC-servomoottori vs askelmoottori: mitä sinun pitäisi käyttää?
Yksi yleisimmistä liikkeenohjauksen kysymyksistä on, käytetäänkö AC-servomoottoria vai askelmoottoria. Molemmat voivat ohjata asentoa, mutta ne toimivat hyvin eri tavalla ja sopivat erilaisiin sovelluksiin.
Askelmoottori liikkuu kiintein askelin (askelin) ja toimii avoimessa silmukassa – eli useimmissa perusasennuksissa ei ole kooderin palautetta. Se on yksinkertainen, halpa ja toimii hyvin kevyillä kuormilla kohtuullisilla nopeuksilla. Stepperit voivat kuitenkin jättää askelia ylikuormitusolosuhteissa ilman itsekorjausta, ja ne menettävät merkittävän vääntömomentin suuremmilla nopeuksilla.
Sen sijaan AC-servomoottori tietää aina tarkalleen missä se on kooderin ansiosta. Se ei menetä asentoaan kuormituksen alaisena, reagoi nopeammin komentoihin ja säilyttää täyden vääntömomentin laajalla nopeusalueella. Kompromissina ovat kustannukset ja monimutkaisuus – servojärjestelmä (moottorin käyttökaapeleiden viritys) maksaa huomattavasti enemmän kuin vastaavan kokoinen stepper-kokoonpano.
Tässä on yksinkertainen nyrkkisääntö: käytä stepperiä yksinkertaiseen, vähäkuormitukseen ja hitaita paikannukseen, kun kustannukset ovat kriittisiä. Käytä AC-servomoottoria, kun tarvitset suurta nopeutta, suurta vääntömomenttia, dynaamisia kuormituksen muutoksia tai kun asennon tarkkuus ei ole kiistaton.

AC-servomoottorien yleiset sovellukset
AC-servomoottorit näkyvät lähes kaikilla toimialoilla, joilla vaaditaan ohjattua liikettä. Jotkut yleisimmistä sovelluksista ovat:
- CNC-työstökeskukset: Servomoottorit käyttävät jyrsinkoneiden ja sorvien X-, Y- ja Z-akseleita sekä karaa joissakin kokoonpanoissa. Niiden avulla kone voi leikata monimutkaisia muotoja mikronitason tarkkuudella.
- Teollisuusrobotit: 6-akselisen robottivarren jokaista niveltä käyttää tyypillisesti oma servomoottori. Kaikkien nivelten koordinoitu ohjaus mahdollistaa sujuvan ja tarkan liikkeen monimutkaisia polkuja pitkin.
- Pakkauskoneet: Servomoottorit ohjaavat indeksointia, leikkausta, sulkemista ja täyttöä nopeilla pakkauslinjoilla, joissa toistettavuus ja nopeus ovat tärkeitä.
- Puolijohteiden valmistus: Kiekkojen käsittely-, poiminta- ja paikka-järjestelmät ja tarkastuslaitteet luottavat servomottoreihin nanometritason paikannustoistettavuuden saavuttamiseksi.
- Tulostus ja muuntaminen: Rekisterin hallinta painokoneissa ja kireyden hallinta rainankäsittelyjärjestelmissä ovat riippuvaisia servomoottoreista tasaisen materiaalin syötön ylläpitämiseksi.
- Lääketieteelliset laitteet: CT-skannerit, kirurgiset robotit ja infuusiopumput käyttävät pieniä, tarkkoja servomoottoreita turvallisen ja tarkan toiminnan varmistamiseksi.
Kuinka valita oikea AC-servomoottori
Oikean AC-servomoottorin valitseminen edellyttää, että moottorin ominaisuudet sovitetaan huolellisesti sovelluksesi vaatimuksiin. Tämän vaiheen kiirehtiminen johtaa joko alitehoiseen järjestelmään, joka epäonnistuu kentällä, tai ylimitoitettuun, ylihinnoiteltuun ratkaisuun. Toimi seuraavasti:
Vaihe 1 – Määritä kuormitusvaatimukset
Aloita laskemalla kuorman vääntömomentti, joka sisältää siirrettävän voiman tai painon, kitkan ja minkä tahansa mekaanisen voimansiirron (vaihteisto, hihna, kuularuuvi). Laske myös kuorman hitaus - tämä kertoo kuinka paljon energiaa moottorin on annettava kuormituksen kiihdyttämiseksi. Teollisuuden yleinen ohje on pitää kuorman ja moottorin inertiasuhde alle 10:1:ssä hyvän ohjauksen vakauden varmistamiseksi ja mieluiten 3:1:ssä tai vähemmän korkean dynaamisissa sovelluksissa.
Vaihe 2 – Määritä liikeprofiilisi
Piirrä nopeus vs. aika -kaavio liikesyklillesi. Huomioi tarvittava huippunopeus, kiihtyvyys- ja hidastusajat sekä käyttöjakso (kuinka kauan moottori käy jatkuvasti vs. lepotilassa). Tämä määrittää sekä tarvittavan huippuvääntömomentin (kiihdytyksen aikana) että RMS-vääntömomentin (root mean square), jonka on pysyttävä moottorin nimellisen jatkuvan vääntömomentin alapuolella ylikuumenemisen välttämiseksi.
Vaihe 3 – Valitse moottorin runko ja teho
Kun tiedät vääntömomentti- ja nopeusvaatimukset, valitse moottori, jonka nimellisvääntömomentti ja -nopeus kattaa tarpeitasi mukavasti marginaalilla (yleensä 20–30 %). Varmista myös, että fyysinen rungon koko sopii asennustilaan – servomoottorit ovat yleensä saatavilla laippakokoina 40–200 mm tai suurempina.
Vaihe 4 – Yhdistä servokäyttö
Servokäyttö on sovitettava moottorin jännitteeseen, virtaan ja anturityyppiin. Useimmat valmistajat myyvät yhteensopivia moottorikäyttöisiä sarjoja (esim. Yaskawa Sigma -sarja, Mitsubishi MR-J -sarja, Siemens S-1FK -sarja), mikä yksinkertaistaa asennusta. Jos sekoitat merkkejä, tarkista huolellisesti yhteensopivuus jännitteen, enkooderin protokollan (inkrementaalinen, absoluuttinen, EnDat, BiSS-C jne.) ja ohjausliitännän (pulssi/suunta, analoginen ±10V, EtherCAT, PROFINET jne.) välillä.
Vaihe 5 – Ota huomioon ympäristöolosuhteet
Tarkista toimintaympäristö. Jos moottori altistuu jäähdytysnesteelle, pölylle tai huuhtelunesteelle, tarvitset IP65- tai IP67-luokitellun moottorin. Jos se toimii äärimmäisissä lämpötiloissa, tarkista moottorin ympäristön lämpötila-alue. Ruostumattomasta teräksestä valmistettuja akselitiivisteitä ja erikoispinnoitteita voidaan tarvita elintarvike- ja juoma- tai lääkesovelluksissa.
Johdotuksen ja asennuksen perusteet
AC-servomoottorin oikea asennus on yhtä tärkeää kuin oikean moottorin valinta. Muutama keskeinen seikka pitää mielessä:
- Erilliset virta- ja signaalikaapelit: Reititä aina moottorin tehokaapeli (U-, V-, W-vaiheet) erilleen anturin takaisinkytkentäkaapelista. Niiden ajaminen samassa putkessa voi aiheuttaa häiriöitä, jotka horjuttavat ohjaussilmukkaa.
- Käytä suojattuja kaapeleita: Sekä virtakaapelin että enkooderin kaapelin tulee olla suojattuja ja suojan toisessa päässä (yleensä taajuusmuuttajan päässä) maadoitettu kohinan poimimisen estämiseksi.
- Maadoita moottorin runko: Moottorin kotelo on kytkettävä koneen rungon maahan sähköiskujen estämiseksi ja EMI-päästöjen vähentämiseksi.
- Tarkista vaihejärjestys: U-, V-, W-liitäntöjen on oltava yhteensopivia moottorin ja taajuusmuuttajan välillä. Jos moottori käy väärään suuntaan, vaihda kaksi vaihejohtoa – älä koskaan vaihda kooderin johtoja suunnan korjaamiseksi.
- Käytä dynaamista jarruvastusta: Pystysuoraa kuormaa käyttävissä tai nopeita pysäytyksiä vaativissa moottoreissa taajuusmuuttajaan kytketty ulkoinen jarruvastus absorboi regeneratiivista energiaa hidastuksen aikana ja estää ylijänniteviat.
Servokäytön viritys: Paras suorituskyky
Johdotuksen jälkeen servokäyttö on viritettävä, jotta ohjaussilmukka vastaa oikein moottorin kuormitusyhdistelmääsi varten. Useimmat nykyaikaiset servokäytöt sisältävät automaattisen viritystoiminnon, joka pyörittää moottoria testirutiinin läpi ja laskee automaattisesti optimaaliset vahvistusasetukset. Tämä riittää yleensä tavallisiin sovelluksiin.
Vaativissa sovelluksissa – kuten nopea poiminta ja paikka tai tarkkuushionta – kolmen tärkeimmän PID-vahvistuksen (paikan vahvistuksen, nopeuden vahvistuksen ja integraalivahvistuksen) manuaalinen viritys voi olla tarpeen. Vahvistusten lisääminen saa järjestelmän reagoimaan nopeammin ja jäykemmin, mutta liian korkeaksi ja järjestelmä muuttuu epävakaaksi ja värähtelee. Tavoitteena on saada nopea vastaus ilman ylilyöntejä tai metsästystä.
Useimmat asemat mahdollistavat myös lovisuodattimien asettamisen mekaanisten resonanssitaajuuksien vaimentamiseen, eteenpäinkytkennän vahvistuksen parantamaan seurantatarkkuutta kiihdytyksen aikana ja kitkakompensointia asentovirheen vähentämiseksi alhaisilla nopeuksilla. Näiden asetusten oikea virittäminen voi vaikuttaa merkittävästi koneen lopulliseen paikannustarkkuuteen ja suorituskykyyn.
Huolto- ja vianetsintävinkkejä
AC-servomoottorit ovat yleensä erittäin luotettavia, koska niissä ei ole kuluvia harjoja tai kommutaattoria. Jonkin verran huoltoa kuitenkin tarvitaan ajan mittaan:
- Laakerin vaihto: Moottorin laakerit ovat yleisin kuluva osa. Useimmat valmistajat määrittävät laakerien vaihtovälit käyttötuntien perusteella - tyypillisesti 20 000 - 30 000 tunnin välein. Liiallinen tärinä tai melu on varhainen merkki laakerien kulumisesta.
- Enkooderikaapelin tarkastus: Enkooderin kaapeleita taivutetaan usein toistuvasti (etenkin robottikäsivarsissa tai portaalijärjestelmissä), ja niihin voi kehittyä sisäisiä katkoksia ajan myötä. Jos servo alkaa näyttää virheellisiä asentovirheitä tai vikoja, epäile ensin kooderin kaapelia.
- Ylikuumenemisen tarkastukset: Jos moottori käy kuumana, varmista, että käyttöjakso on spesifikaatioiden mukainen, että ympäristön lämpötila on hyväksyttävä ja että moottorin pinta on puhdas eikä siinä ole esteitä. Jatkuva ylikuumeneminen heikentää käämin eristystä ja lyhentää moottorin käyttöikää.
- Ajon hälytyskoodit: Kun vika ilmenee, lue aina hälytyskoodi servokäytön näytöstä tai ohjelmistosta. Yleisiä koodeja ovat ylijännite, ylivirta, kooderivirhe, ylikuormitus ja asennon poikkeamaylimäärä. Jokainen osoittaa sinut suoraan perimmäiseen syyyn.
Moottorin käyttötuntien, hälytyshistorian ja fyysisten tarkastusten huoltopäiväkirjan pitäminen auttaa ennakoimaan vikoja ennen kuin ne aiheuttavat odottamattomia seisokkeja.
Edellinen viesti
Ei aiempaa artikkelia
Seuraava viesti
Keskijännitteisen taajuusmuuttajan selitys: miten se toimii, mikä topologia valita ja mitä määrittää
Tekijänoikeus 2024 Fujian Raynen Technology Co., Ltd. Kaikki oikeudet pidätetään.
Tietosuojakäytäntö  Moottoriohjauksen valmistajat
Moottoriohjauksen valmistajat